


История развития роботических технологий в медицине
Аннотация
Роботичеcкие технологии неуклонно и стремительно входят в нашу повседневную жизнь. Применение роботов широко распространено в различных профессиональных отраслях. Робот-ассистированная техника выполнения оперативных вмешательств в настоящее время является наиболее инновационным направлением в медицине. В данной статье описывается история развития роботических технологий в медицине в целом и в урологии в частности.
Ключевые слова: робот-ассистированная хирургия, роботы в медицине, робот da Vinci.
Введение
В эру телекоммуникаций и компьютерных технологий произошли серьезные изменения во всех аспектах профессиональной и бытовой жизнедеятельности. Новейшие концепции автоматизированных и роботических решений нашли свое применение во многих отраслях промышленности. С недавнего времени роботы в медицине в целом и в хирургии в частности стали неотъемлемой частью повседневной практики.
Определение
Согласно Американскому институту по изучению роботической техники (The Robot Institute of America), робот представляет собой репрограммируемый мультифункциональный манипулятор, предназначенный для перемещения/передвижения материалов, предметов, их частей или иных специализированных устройств с целью выполнения различных задач. В словаре Вебстера (Websters’ English Dictionary) робот определяется как «автономный аппарат или устройство, осуществляющий различные действия, свойственные человеку, и выполняющий их как будто под контролем человеческого разума». Вышеуказанные определения робота объединяют три основных функции – способность выполнять определенные действия, возможность решать различные задачи на запрограммированной основе, а также способность робота интерпретировать и модифицировать ответы на команды оператора.
История
С древних времен человечество пыталось использовать машины для облегчения своего труда, выполнения наиболее тяжелой работы, требующей значительных физических усилий. Однако в IX в. до н.э. впервые подобное устройство было предложено для развлечения. Древнегреческий философ, математик и механик Архит Тарентский (428–347 гг. до н.э.) спроектировал первую летающую машину – деревянную птицу, способную самостоятельно двигать крыльями при помощи пара и перемещаться на расстояние до 200 м (рис. 1).
 Рис. 1. Архит Тарентский (428–327 гг. до н.э.) и его летающая машина
Рис. 1. Архит Тарентский (428–327 гг. до н.э.) и его летающая машинаСледующим шагом стало изобретение древнегреческим математиком Ктесибием Александрийским (285–222 гг. до н.э.) в 250 г. до н.э. хитроумных водяных часов, названных клепсидрами, ставшими самыми точными определителями времени вплоть до изобретения в XVII в. голландским физиком Христианом Гюйгенсом маятника для поддержания незатухающих колебаний (рис. 2).
Великий итальянский ученый, анатом, естествоиспытатель, художник и архитектор Леонардо да Винчи (1452–1519) (рис. 3) создал несколько так называемых манекенов, способных выполнять запрограммированные действия.
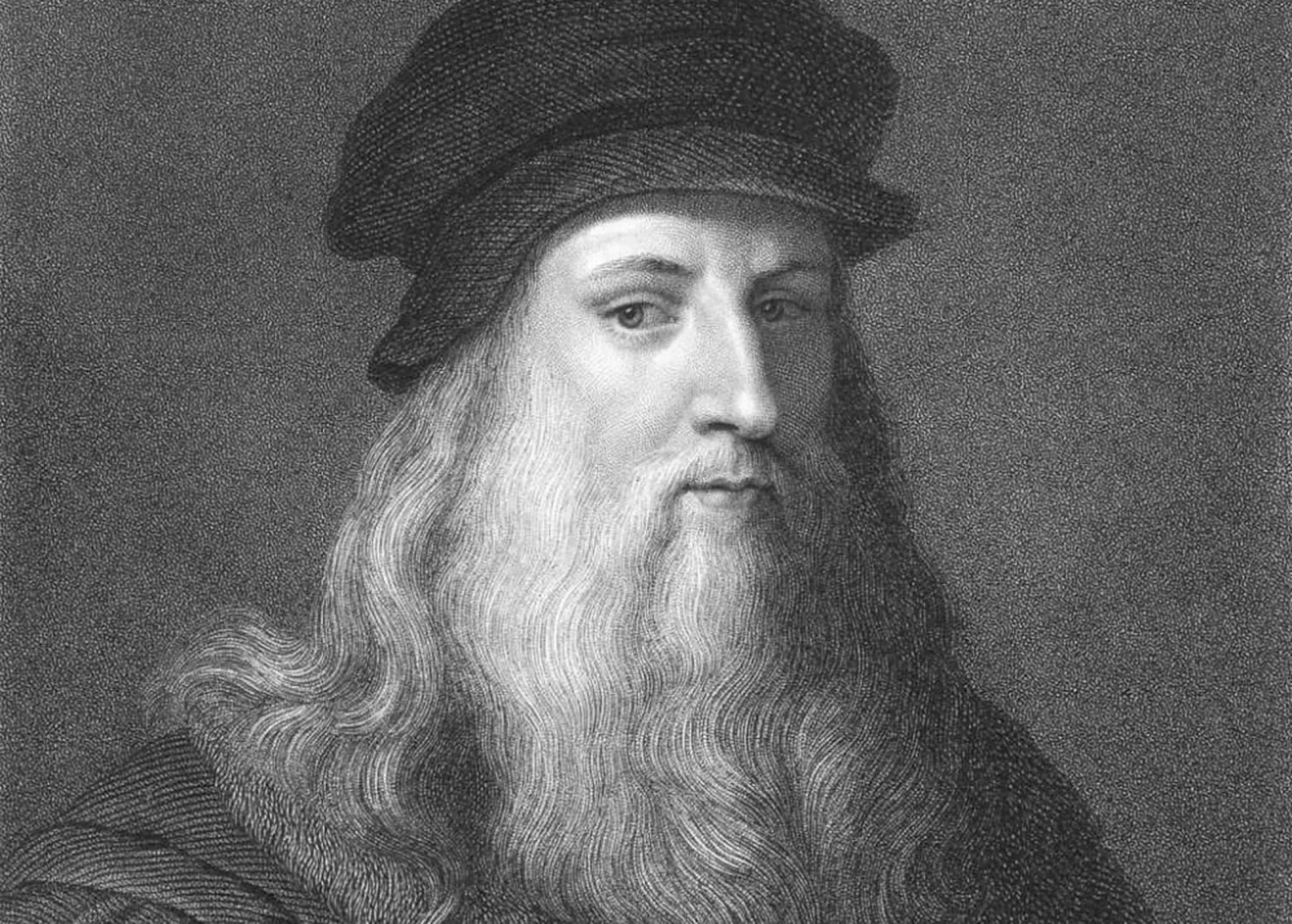 Рис. 3. Леонардо да Винчи (1452–1519)
Рис. 3. Леонардо да Винчи (1452–1519)В его коллекции нашлось место механическим птице и льву, способному ходить, подниматься на задние лапы и даже преподносить букет лилий королю Франции. Однако самым интересным экспонатом стал созданный в 1495 г. механический манекен в форме вооруженного рыцаря, получивший название «Робот Леонардо» (рис. 4)
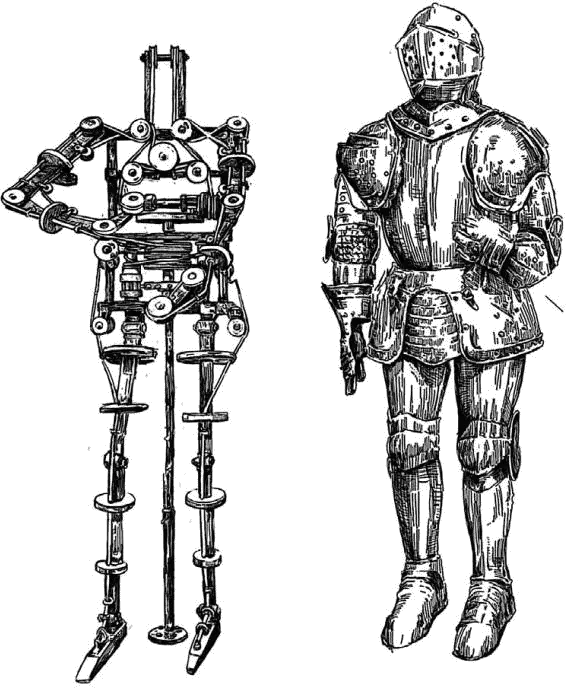 Рис. 4. «Робот Леонардо»
Рис. 4. «Робот Леонардо»В эпоху Возрождения имели место еще несколько случаев создания подобных манекенов. Наиболее знаменитыми стали женщина, играющая на лютне, созданная Джианелло Ториано в 1540 г., и ребенок Пьера Жаке Дро, представленный в 1772 г.
В 1801 г. был предложен для применения автоматизированный ткацкий стан узорчатых материй, способный к программированию при помощи перфокарт, сходными с картами, применявшимися для программирования ЭВМ в 1960–1970-х гг. Автором данного устройства стал французский изобретатель Жозеф Мари Жаккар (1752–1834), а стан получил название «Машина Жаккара» (рис. 5).
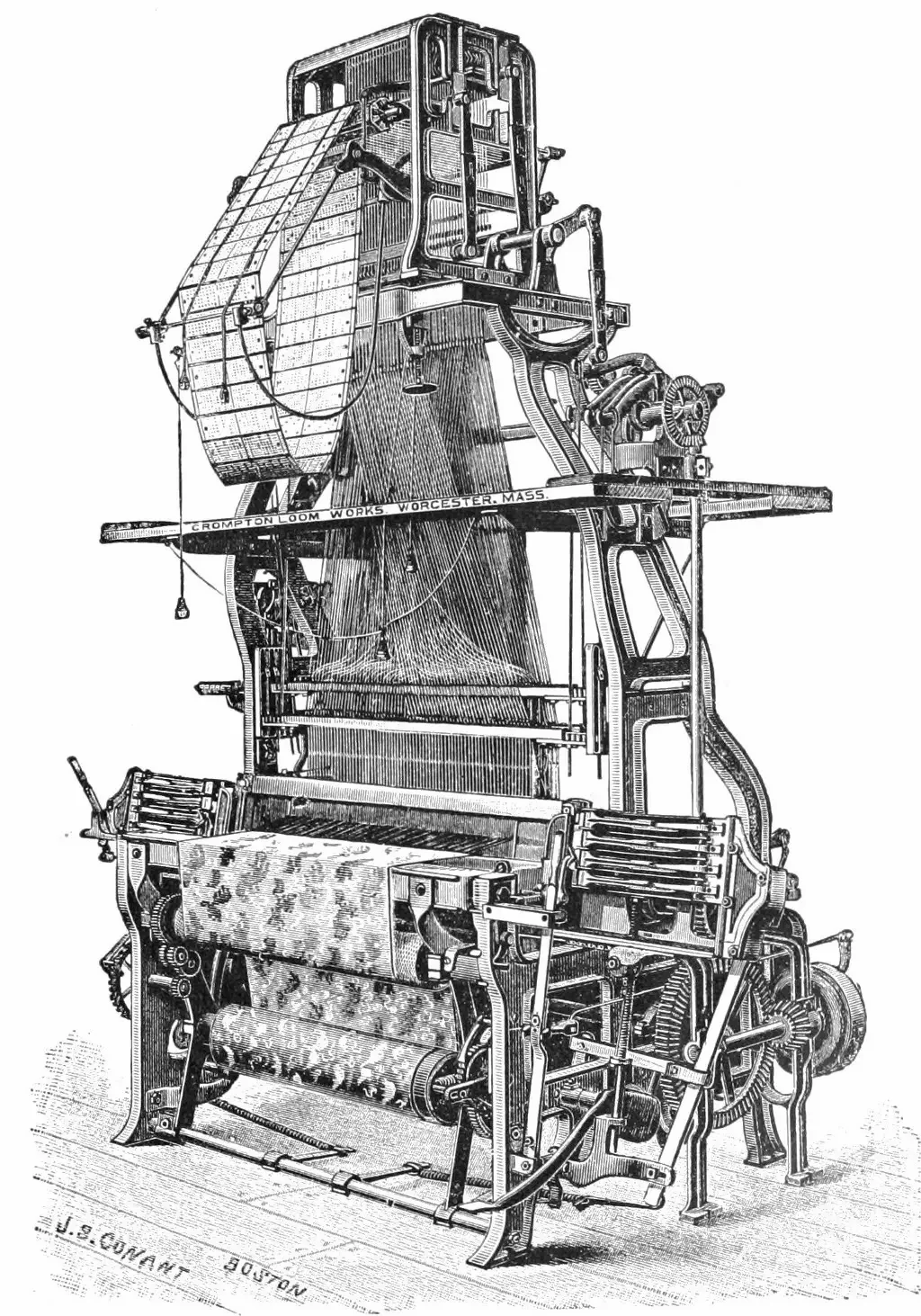 Рис. 5. Машина Жаккара
Рис. 5. Машина Жаккара
В 1865 г. Эдвард Эллис (Edward S. Ellis) в своем историческом романе «Громадный охотник, или Паровой Человек в прериях» («The Huge Hunter, or the Steam Man of the Prairies») поведал миру об одаренном конструкторе – Джонни Брейнерде (Johnny Brainerd), который первым построил «человека, который движется на пару» (рис. 6).
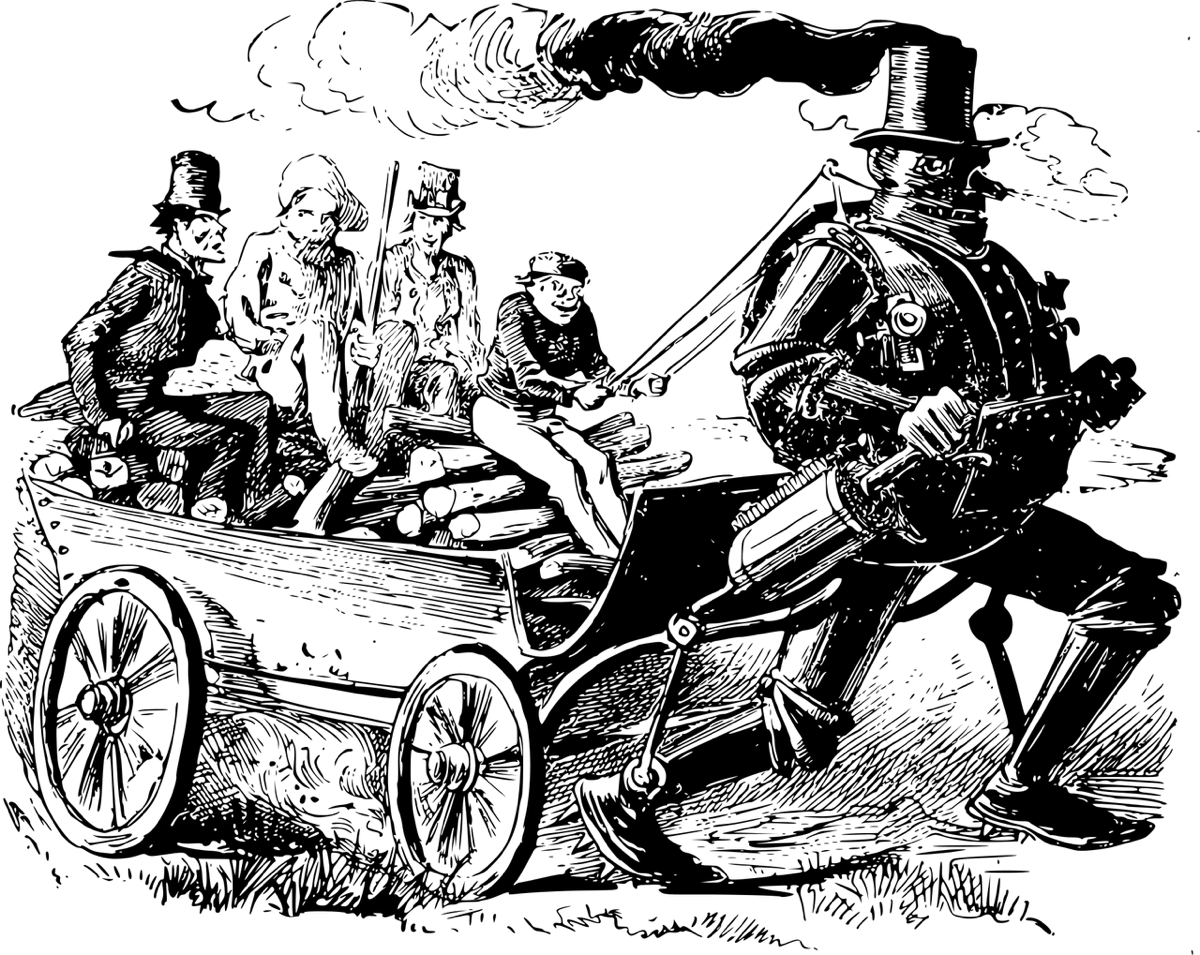 Рис. 6. Паровой человек
Рис. 6. Паровой человек
Паровой Человек не был роботом в полном смысле этого слова, скорее, это был паровоз в форме человека. К счастью, некоторое описание машины Брейнерда сохранилось: «Этот могучий исполин был приблизительно трехметрового роста, ни одна лошадь не могла сравниться с ним: гигант с легкостью тянул фургон с пятерыми пассажирами. Там, где обычные люди носят шляпу, у Парового Человека была труба дымохода, откуда валил густой черный дым. У механического человека все, даже лицо, было сделано из железа, а тело его было окрашено в черный цвет. Экстраординарный механизм имел пару как бы испуганных глаз и огромный усмехающийся рот. В носу у него было приспособление, подобное свистку паровоза, через которое выходил пар. Там, где у человека находится грудь, у него был паровой котел с дверцей для подбрасывания поленьев. Две его руки держали поршни, а подошвы массивных длинных ног были покрыты острыми шипами, чтобы предотвратить скольжение. В ранце на спине у него были клапаны, а на шее – вожжи, с помощью которых водитель управлял Паровым Человеком, в то время как слева шел шнур для контроля над свистком в носу. При благоприятных обстоятельствах Паровой Человек был способен развивать очень высокую скорость». По свидетельствам очевидцев, первый Паровой Человек мог двигаться со скоростью до 30 миль в час (около 50 км/час), а фургон, запряженный этим механизмом, шел почти так же стабильно, как железнодорожный вагон. Единственным существенным недостатком была необходимость постоянно возить с собой огромное количество дров, ведь "подкармливать" Парового Человека приходилось беспрерывно». В современной истории впервые слово «робот» применил чешский писатель Карел Чапек (Karel Capek) в своей научно-популярной пьесе «R.U.R» (Rossum’s Universal Robots) в 1923 г.1
Слово «робот» происходит от чешского слова «robota», обозначающего тяжелый физический труд.
Айзек Азимов (Isaac Assimov) в романе «Хоровод» (Runaround, 1942) предложил для использования слово «робототехника» и сформулировал так называемые законы робототехники, которые стали непреложными для многих писателей.2
Первые функциональные роботы появились в середине XX в. В 1954 г. Джордж Девол (George Devol) и Джо Энглебергер (Joe Engleberger) разработали роботическую руку, управляемую посредством электронного контролера. Движения руки программировались и осуществлялись при помощи гидравлической системы. Данное устройство получило название «Анимэйт» (Unimate) (рис. 7).
Впервые роботическая рука была применена на конвейерах сборки автомобилей компании «Дженерал Моторс» (General Motors). Дальнейшее развитие устройство приобрело в 1978 г., когда Виктор Шейнман (Victor Scheinman) предложил свое изобретение под названием «Универсальная программированная рука-манипулятор» (Programmable Universal Manipulation Arm (PUMA)). Основными отличиями от предыдущей модели стали наличие большей свободы движений и способности выполнять более сложные технические задания. Более того, устройство PUMA оснащалось электроприводом. Все это позволило изобретению стать эталоном промышленного робота на многие годы.
К настоящему времени функциональные роботы продолжают развиваться и уже способны не только самостоятельно передвигаться (Cart, Genghis, Shadow Biped), но и взбираться по лестницам и переносить грузы (Asimo, Honda), играть на музыкальных инструментах (Partner), изображать домашних животных (Aibo, iCybie), собирать образцы породы на Марсе (Sojourner), обеспечивать работу международной космической станции (SSRMS), а также участвовать в поиске и спасении людей в чрезвычайных ситуациях.
Роботизированные технологии приобретают все большую популярность в медицинской отрасли. Многочисленные роботические системы были предложены для помощи инвалидам и пожилым людям. Автоматические программируемые инвалидные кресла облегчают жизнь пациентам с частичной или полной утратой способности передвижения. Для помощи пожилым пациентам разработан целый ряд роботизированных устройств, способных не только напомнить о необходимости своевременного приема лекарственного средства (Nursebot)3-5, но и заменить доктора у постели больного (RP-6 robot).6 При этом специалист общается с пациентом посредством интернет- технологий.
Существует целый ряд роботических решений для применения в системе здравоохранения без непосредственного контакта с пациентами. К ним относятся лабораторные и транспортные системы.7,8 Роботизированные лабораторные комплексы способны обеспечить бесперебойное функционирование многопрофильного учреждения с минимальной затратой человеческих ресурсов, что, несомненно, является экономически выгодным аспектом.9
История развития хирургических роботических систем начинается с использования в нейрохирургической манипуляции в 1985 г. системы Programmable Universal Manipulation Arm (PUMA) 560 для выполнения точечной биопсии головного мозга под КТ-наведением.10 К настоящему времени применение данной технологии прекращено по соображениям безопасности.
В 1988 г. для выполнения автоматизированной трансуретральной резекции простаты (ТУРП) была разработана роботическая система Probot. В том же году была выполнена первая ТУРП. Для этого в предоперационном периоде была сконструирована 3D-модель простаты, края резекции были очерчены хирургом, а траектории движения резектоскопа рассчитаны роботической системой.11
Robodoc (IBM) стала первой роботической системой, предложенной для применения в ортопедии при протезировании тазобедренных суставов.12 В последующем появлялись более усовершенствованные модели, обладающие способностью в автоматическом режиме выполнять необходимые манипуляции для завершения процедуры замещения тазобедренного сустава (Caspar system, Acrobot)13 (рис. 8).
К началу 1995 г. была разработана нейрохирургическая роботическая система Minerva, использующая данные динамического КТ, что позволяло вносить коррективы в ход процедуры в режиме реального времени. Однако необходимость нахождения пациента в аппарате КТ на протяжении всей манипуляции существенно ограничило применение системы.14 К настоящему времени разработана хирургическая роботическая система Cyberknife для выполнения ультраточной лучевой терапии злокачественных новообразований головного мозга. Для достижения максимально возможной аккуратности при облучении используется технология пошаговой корреляции изображений дооперационного КТ и рентгеновских исследований, проводимых в ходе манипуляции в режиме реального времени.15
В 1994 г. компания Computer Motion изготовила первого робота-хирурга, получившего сертификат US FDA – Automated Endoscopic System for Optimal Positioning (AESOP). Изначально система разрабатывалась NASA для космической программы. Это была механическая рука, предназначенная для автоматического изменения положения эндоскопа. Двумя годами позже AESOP «приобрел» слух и смог выполнять голосовые команды хирурга. К 1998 г. модель AESOP 3000 обладала семью степенями свободы. Система прикреплялась к операционному столу и посредством различных переходников и адаптеров получила способность удерживать и манипулировать эндоскопом. Ряд авторов сообщили о преимуществах данной системы над ассистентом при управлении лапароскопической камерой (Kavoussi et al., 1995). При этом было проведено сравнительное исследование, в которое были включены 11 пациентов. Были выполнены билатеральные оперативные вмешательства, причем при операции, с одной стороны, ассистировал специалист, а, с другой стороны, камерой управляла роботическая система. Авторы не отметили какого-либо отличия в продолжительности операции, однако хирурги себя чувствовали комфортнее при роботической ассистенции. Группа урологов из John Hopkins Hospital провела целый ряд операций с использованием системы AESOP, включая нефрэктомию, ретроперитонеальную лимфаденэктомию, пиелопластику, операцию Берча, орхопексию и нефропексию. При этом авторы также отметили больший комфорт при роботической ассистенцией при отсутствии разницы во времени оперативного лечения (Partin A. W. et al., 1995). В 1998 г. группа ученых во главе с Mettler применила систему AESOP для выполнения 50 гинекологических операций. В результате авторы пришли к выводу, что применение роботической системы не удлиняет время операции. Все указанные работы валидизировали применение роботической системы AESOP для ассистенции при выполнении лапароскопических операций. При помощи системы AESOP впервые была промотирована идея соло-лапароскопии. В последующем ряд авторов провели серии соло-операций, включая такие лапароскопические вмешательства, как пластика паховой грыжи, холецистэктомия, фундопликации и адреналэктомии (Geis et al.,1996, Hubens G. et al., 1999). Двумя годами позже в США было выполнено исследование по изучению безопасности и эффективности применения роботической системы для выполнения соло–лапароскопической колостомии (Balantyne et al., 2001). Во всех случаях оперативные лечения выполнялись без привлечения ассистента. Таким образом, была доказана безопасность и эффективность концепта лапароскопической солохирургии с роботической ассистенцией.
Роботическая система AESOP препроводила лапароскопическую хирургию в эру робот-ассистированной. Система смогла полноценно заменить ассистента при выполнении различных операций, предоставляя одновременно хирургу идеальную видимость и точность движений. К 1999 г. более 80 000 оперативных вмешательств было выполнено с использованием технологии AESOP.
Следующим шагом в эволюции роботической хирургии стало развитие дистанционной телероботической хирургии. Концепция данного проекта состояла в том, что хирург находится у консоли, а компьютер транслирует его движения на манипуляторы, расположенные в организме пациента. Непосредственно телеробот должен находится у операционного стола и быть способным манипулировать не только камерой, но и несколькими «руками» с инструментами. Разработки в области роботической дистанционной телемедицины были одновременно начаты тремя государственными организациями в США, что привело к созданию военного прототипа, способного обеспечить помощь раненным непосредственно на поле боя. При этом хирург находился глубоко в тылу и осуществлял манипуляции дистанционно при помощи теле- визионной трансляции.16 В настоящее время доступны для использования две роботические хирургические системы: система ZEUS17 и система da Vinci.
Компания Computer Motion разработала и представила роботическую систему ZEUS в 1990 г. Основана система на базе AESOP и обладает двумя подсистемами – хирурга и пациента. Подсистема хирурга состоит из консоли с видеомонитором и двумя рукоятками, контролирующими работу манипуляторов. Манипуляторы удерживают инструменты. Консоль хирурга может быть расположена в любом месте в пределах операционной. Подсистема пациента состоит из трех роботических рук, прикрепленных к операционному столу (рис. 9).
В последующем был предложен более эргономичный вариант, в котором присутствовала система AESOP для управления камерой. Компьютер во время операции следил за инструментами и передавал информацию камере для полноценной их визуализации. Более того, именно компьютерный интерфейс модифицировал движения рук хирурга в движение роботических манипуляторов.
Оптическая система была предоставлена компанией Karl Storz system (Karl Storz Endoscopy, Santa Barbara, CA). Для создания 3D-эффекта был предложен интересный подход. Две камеры (правая и левая) изолированно передавали сигнал со скоростью 30 кадров в секунду. Компьютер превращал их искусственно в 60 кадров в секунду и передавал их на монитор хирурга. Для работы хирург должен был надевать специальные очки, позволяющие воспринимать сигналы и модифицировать их в 3D-визуализацию.
Изначально хирургическая система ZEUS была создана для кардиохирургических манипуляций и лишь затем произошла ее валидизация в других специальностях (общая хирургия, гинекология и урология). Несмотря на работы, сообщающие об успешном выполнении серий кардиохирургических операций, система обладает целым рядом ограничений. Громоздкость системы создает выраженную сложность в формировании операционной. Неправильное расположение трокаров полностью блокирует выполнение всего оперативного вмешательства. Отсутствие тактильной чувствительности диктует хирургу необходимость полагаться на собственную интуицию в ряде моментов. При этом сами инструменты обладают лишь шестью степенями свободы. Самым главным ограничением является 3D-визуализация. Необходимость наличия специальных очков для преобразования 2D- в 3D-сигнал резко затрудняет выполнение операций. Более того, смоделированный компьютерным интерфейсом 2D-сигнал без очков выглядит размыто и не позволяет чувствовать себя комфортно ассистенту и хирургу при снятии очков. Но главным отличием системы ZEUS от других роботических систем является тот факт, что компания Computer Motion создала интегрированный роботический продукт для операционной вместо иммерсионного интуитивного интерфейса. Именно этот факт позволяет системе выступать лишь в качестве ассистента, а не как оперирующий хирург. Все попытки компании популяризировать свой продукт сошли на нет в 2003 г., когда компания Intuitive Surgical поглотила компанию Computer Motion, ознаменовав тем самым завершение времени существования хирургической роботической системы ZEUS.
Компании Intuitive Surgical Inc. (Sunnyvale, CA, USA) удалось выкупить создаваемый военными организациями прототип роботической системы для применения в гражданских целях. Результатом стало появление хирургической роботической системы da Vinci, основанной на принципах дистанционной телемедицины. В настоящее время система da Vinci является единственной подобной системой и неоспоримым лидером в области роботической хи- рургии. Система da Vinci состоит из трех компонентов:
1) консоль хирурга (рис. 10);
2) тележка пациента;
3) оптическая система.
Консоль хирурга является панелью управления всей системы и местом работы оператора, осуществляющего управление тремя инструментами- манипуляторами и камерой тележки пациента при помощи двух джойстиков и ножных педалей (рис. 11).
Движения рук хирурга полностью копируются джойстиками и передаются на манипуляторы, нивелируя тремор и обеспечивая возможность прецизионной диссекции. Ножные педали обеспечивают активацию процесса коагуляции (система оснащена как монополярным, так и биполярным типом коа- гуляции), переключение между рабочими манипуляторами и камерой, а также фокусировку оптической системы. При помощи консоли хирург обладает возможностью удаленного управления системой, таким образом, консоль может быть расположена за пределами операционной.
Эффект присутствия обеспечивается оптической системой, состоящей из двух параллельных камер, передающих изолированное изображение для каждого глаза (рис. 12).
При этом передаваемое изображение является трехмерным, что позволяет хирургу определять объемное положение органов и тканей пациента в пространстве. Каждая камера оснащена собственным источником света, имеет собственную панель управления. Для получения реального 3D-изображения одним из компонентов высокотехнологичной оптической системы является синхронизатор, обеспечивающий равномерное восприятие изолированных сигналов обоими глазами хирурга. Связь хирурга с операционной обеспечивается при помощи микрофона и динамиков, расположенных как на консоли хирурга, так и на тележке пациента, находящегося в операционной.
Тележка пациента несет на себе рабочие манипуляторы и находится в непосредственном контакте с пациентом во время выполнения всей процедуры (рис. 13).
Три манипулятора с закрепленными на них инструментами, а также один манипулятор с камерой связаны с консолью хирурга при помощи компьютерного интерфейса. Во время подготовки тележки пациента к операции все манипуляторы одеваются в специальные стерильные чехлы и остаются в них на протяжении всей процедуры. Для выполнения роботической хирургии используются инструменты EndoWrist, созданные по образцу человеческого запястья и обладающие семиградусной свободой движения, превосходящие объем движений кисти человека. Набор инструментов EndoWrist включает разнообразие зажимов, иглодержателей, ножниц; монополярных и биполярных электрохирургических инструментов; скальпелей и других специализированных инструментов (всего более 40 типов). Инструменты EndoWrist могут иметь диаметр 5 или 8 мм. Важной особенностью является четкое ограничение использования инструментария. Каждый инструмент может быть применен лишь десять раз, при этом при смене инструментов интерфейс распознает тип нового инструмента и число его использований. Дополнительное оборудование, необходимое для выполнения оперативного пособия, располагается на стойке оборудования и включает в себя инсуфлятор, коагулятор, источник света, аспиратор и ирригатор. Также на стойке расположен допол- нительный монитор для ассистента и компоненты оптической системы.
Валидизация системы da Vinci была начата кардиохирургами. В 1999 г. было опубликовано первое сообщение об успешном выполнении аортокоронарного шунтирования при помощи хирургической системы da Vinci [19]. Огромную работу выполнила группа ученых из Лейпцига (Leipzig group), результатом которой стала публикация целого ряда сообщений об успешном выполнении различных кардиохирургических вмешательств, в том числе и на «включенном» сердце [20, 21]. В феврале 2002 г. кардиохирурги из Columbia Presbyterian Medical Center сообщили о первом в США проведении аортокоронарного шунтирования с использованием системы da Vinci. Сложная, но малоинвазивная операция была проведена через три небольших разреза (8–15 мм) грудной клетки для введения двух манипуляторов и эндоскопа.
В ноябре 2002 г. на сессии American Heart Association были представлены результаты 15 операций по устранению врожденного дефекта межпредсердной перегородки, проведенных в той же клинике, что положило начало открытой роботохирургии сердца без «вскрытия» грудной клетки. Примерно в то же время был опубликован целый ряд работ об успешном применении роботической системы в абдоминальной хирургии. Уже в 1997 г. была успешно выполнена первая лапароскопическая холецистэктомия с использованием прототипа системы da Vinci [22]. Немногим позже ряд авторов сообщили об успешном выполнении целого ряда хирургических вмешательств [23, 24]. В 2001 г. было опубликовано сообщение о наличии технической возможно- сти и безопасности выполнения радикальной простатэктомии с помощью хирургической роботической системы da Vinci [25].
Роботохирургия продолжает стремительно развиваться, завоевывая все большее и большее количество направлений в медицине. Стала реальностью так называемая трансконтинентальная телероботохирургия. В 2001 г. хирурги успешно удалили желчный пузырь с помощью дистанционно управляемой роботической системы, установленной в одном из госпиталей Франции, находясь от пациентки на расстоянии 7000 км в Нью-Йорке. Современные средства связи обеспечили передачу сигналов в обоих направлениях (от видеокамеры лапароскопа к хирургу и обратно – от станции управления к роботу) по трансатлантическому волоконно-оптическому кабелю. Задержка сигнала составляла менее 200 мсек (безопасно допустимое отставание сигнала составляет около 300 мсек) [26]. В настоящее время активно развивается трансоральная роботическая хирургия, хирургия головы и шеи, гинекологическая роботическая хирургия. К 2014 г. имеет место более чем 6000 публикаций, посвященных роботической хирургии, более 4000 систем da Vinci инсталлированы в более чем 1500 медицинских учреждениях по всему миру. В 2013 г. выполнено 350 000 роботических операций по всему миру, наиболее популярными из которых являются роботическая радикальная простатэктомия и роботическая гистерэктомия [27].
Будущее
Чего же можно ожидать от роботохирургии в будущем? Продолжаются работы по созданию новых роботов. Уже доступна двухконсольная модель системы da Vinci, предложенная для обучения консольных хирургов. При этом преподаватель и ученик видят одинаковую картину, сидя каждый за своей консолью. Также доступна модель da Vinci Si – система с наличием изображения высокого качества. В апреле 2014 г. представлена модель Xi. Новые возможности манипуляторов и визуального контроля позволят довести до совершенства оперативные вмешательства на бьющемся сердце. «Руки» робота смогут двигаться в такт сокращениям, постоянно оставаясь на одинаковом расстоянии от зоны оперативного вмешательства и как бы нивелируя колебания стенки сердца. При этом операционное поле, которое хирург видит на экране, будет оставаться неподвижным. Возможно внедрение в интерфейс роботической системы данных МРТ, КТ и ТРУЗИ, выполняемых в режиме реального времени. Активно ведутся работы по уменьшению размеров роботической системы в целом и инструментов в частности.
Урологическая клиника Московского государственного медико-стоматологического университета им. А. И. Евдокимова, обладая наибольшим опытом проведения РРП в России, продолжает принимать активное участие в разработке отечественного робота, в результате чего стало возможным создание основных узлов и функционального макета роботической хирургической системы. Работа по данному направлению выполняется по заданию Минпромторга, что позволяет надеяться на успешное завершение проекта.