ЦИКЛОП: как сохранить нервы и не потерять онкологическую радикальность
В Московском урологическом центре ММНКЦ им. С.П. Боткина представлен опыт применения протокола ЦИКЛОП при выполнении робот-ассистированной радикальной простатэктомии.
Одной из ключевых задач хирургического лечения рака предстательной железы остается поиск баланса между онкологической безопасностью операции и сохранением качества жизни пациента. Применение нервосберегающих методик позволяет улучшить восстановление эректильной функции после вмешательства, однако требует особого контроля для предотвращения риска сохранения опухолевой ткани.
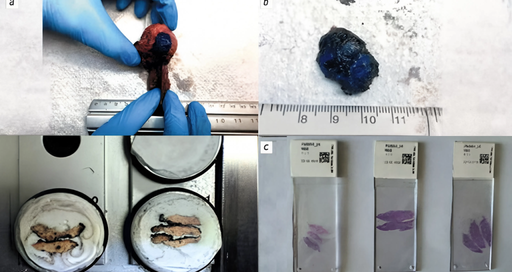
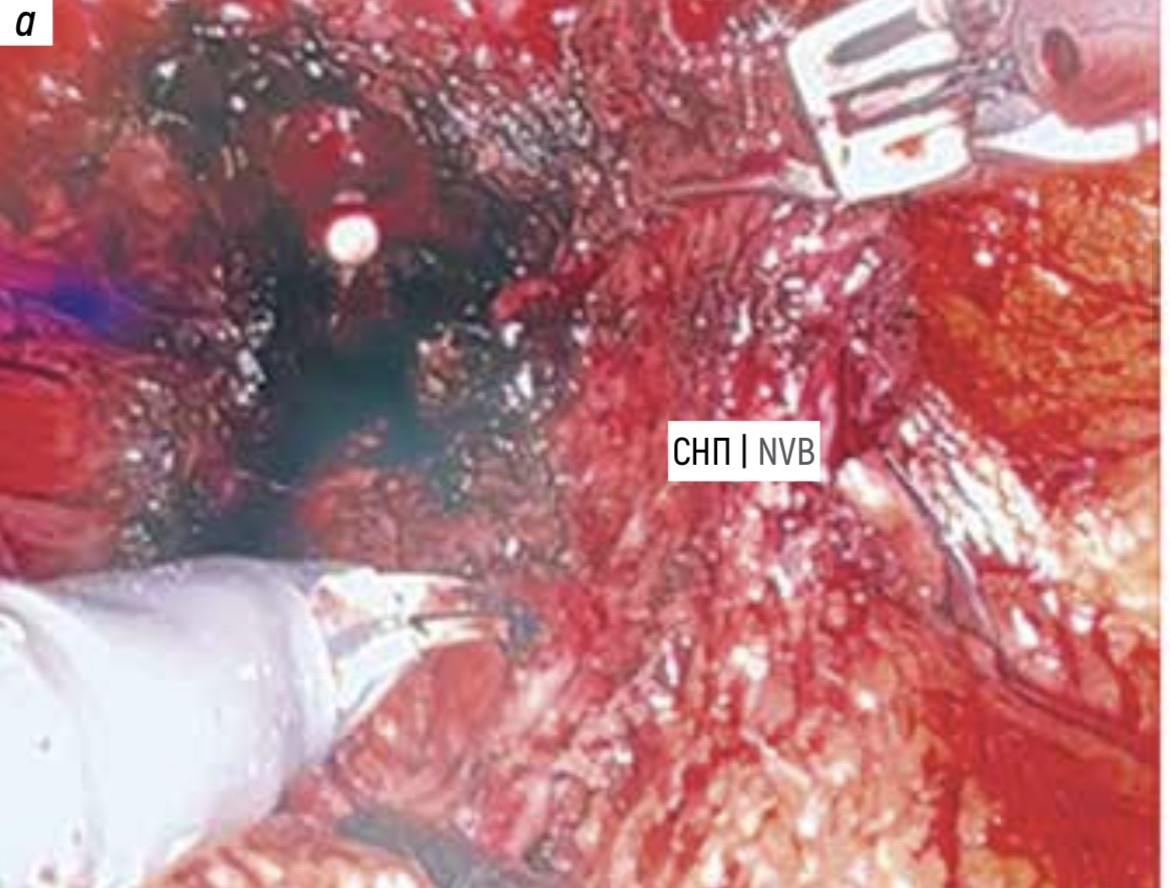
Для решения этой задачи специалисты центра используют протокол ЦИКЛОП — методику срочного интраоперационного гистологического исследования тканей, прилегающих к сосудисто-нервным пучкам. Во время операции удаленный препарат направляется на экспресс-исследование, а полученные результаты позволяют хирургу оценить состояние хирургического края непосредственно в ходе вмешательства. При выявлении опухолевой ткани может быть принято решение о дополнительной резекции сохраненных структур.
Исследование охватило 58 пациентов, которым была выполнена робот-ассистированная радикальная простатэктомия с использованием роботических систем da Vinci Si и da Vinci Xi.
По данным авторов, применение протокола ЦИКЛОП позволяет повысить онкологическую безопасность нервосберегающих операций и потенциально расширить показания к их выполнению, в том числе у пациентов промежуточного и высокого риска развития рецидива. В ходе работы было показано, что методика дает возможность интраоперационно выявлять участки с наличием опухолевой ткани и своевременно корректировать объем хирургического вмешательства.
Авторы отмечают, что дальнейшее изучение протокола позволит оценить его влияние не только на онкологические результаты лечения, но и на функциональные показатели, включая восстановление эректильной функции после операции.
Авторы исследования: М.А. Тулинов, Е.А. Соколов, Е.И. Велиев, Д.Ю. Пушкарь, О.В. Паклина, Г.В. Кнышинский, Л.В. Решетов.
Полный текст статьи опубликован в журнале «Медицинская робототехника»
Релевантные материалы
Последние новости роботической хирургии
-1xundefined)