
Система da Vinci SP
Одной из специализированных платформ в линейке da Vinci SP является система da Vinci SP (Single Port — единый порт), предназначенная для выполнения робот-ассистированных вмешательств через единый хирургический доступ. Модель была представлена компанией Intuitive как отдельное направление развития роботической хирургии и на момент публикации материала не использовалась в клинической практике в России. Об особенностях новой модели da Vinci SP пишет на своем сайте компания-производитель робота Intuitive1.
 Слева направо: видеостойка da Vinci Xi/da Vinci SP, консоль пациента da Vinci X, консоль пациента da Vinci SP, консоль пациента da Vinci Xi, консоль хирурга da Vinci Xi/da Vinci SP
Слева направо: видеостойка da Vinci Xi/da Vinci SP, консоль пациента da Vinci X, консоль пациента da Vinci SP, консоль пациента da Vinci Xi, консоль хирурга da Vinci Xi/da Vinci SP Отличия da Vinci SP от предшественников
Более совершенный анатомический доступ позволяет работать в любой точке анатомического поля в пределах 360° от места размещения порта. Штанга da Vinci SP имеет возможность вращаться сверх 360° относительно удаленного центра канюли и поворачивать инструменты на 360° внутри канюли. Хирурги управляют полностью артикулирующими инструментами и камерой в системе da Vinci SP, которая использует такую же консоль хирурга, как и системы da Vinci X и Xi4.

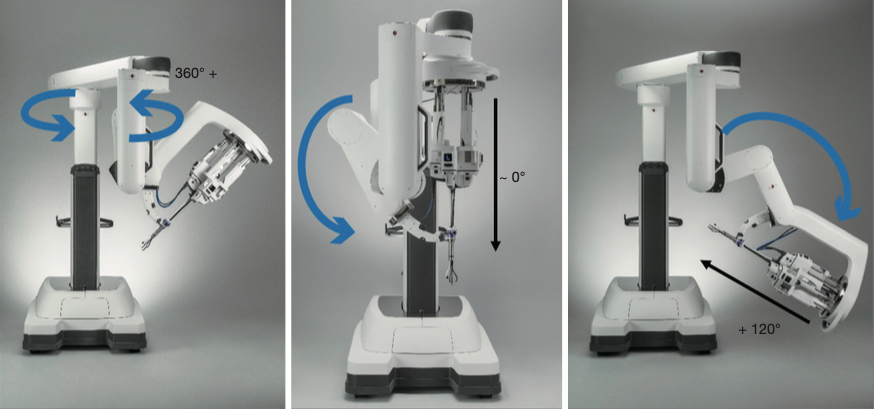
Преемственность роботов линейки da Vinci дает пользователю знакомый, но расширенный пользовательский интерфейс. Хирург может переключать инструменты между руками или разворачивать камеру на 180° нажатием кнопки. Все манипуляции с инструментами отслеживаются при помощи нового интерфейса-навигатора.
Инструменты da Vinci SP
При помощи единственной канюли диаметром 2,5 см (2,5 см - меньший разрез, чем у предыдущей модели2) хирург может управлять тремя инструментами повышенной подвижности, обладающих 7 степенями свободы, а также впервые разработанным и внедренным сверхгибким 3D HD-эндоскопом da Vinci. Также имеется возможность достигнуть глубины проникновения до 24 см и провести триангуляцию инструментов на дистальном конце.

Инструменты и камера EndoWrist SP имеют шарнирные соединения в сочетании со змеевидными суставами запястья инструмента, которые имитируют человеческое запястье, плечо и локоть. Лучезапястный сустав обеспечивает семь степеней свободы, а локтевой сустав поддерживает интракорпоральную триангуляцию. Более примечательной особенностью является система наведения инструмента, которая отслеживает местоположение камеры робота, порта и инструментов в пределах рабочего поля и одновременно перемещает инструменты. С помощью этой системы можно эффективно работать в узком пространстве без столкновения с инструментом5.

Работа инструментов системы da Vinci SP, робот-ассистированная простатэктомия
Обновленные компоненты системы da Vinci SP
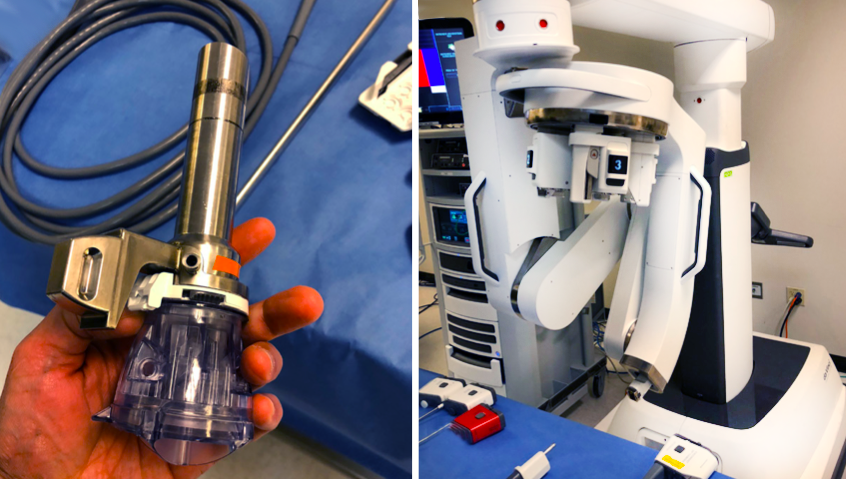
Главным элементом, который претерпел изменение в системе da Vinci SP, стала консоль пациента3. Из ключевых компонентов консоли пациента можно выделить:
- троакар 2,5 см с 4 рабочими параллельными каналами для трех роботических инструментов и одного эндоскопа (на фото слева);
- консоль пациента, имеющую одну роботическую руку (на фото слева);
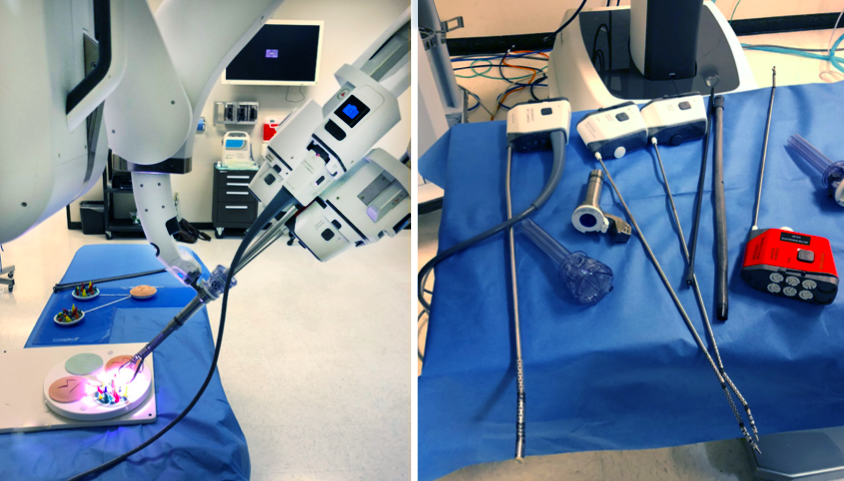
- тренировочное занятие на da Vinci SP;
- инструменты и камера перед установкой в роботическую руку SP.
Доступ Single port
Ключевое отличие системы da Vinci SP от предшественников заключается в том, что доступ в тело пациента осуществляется через единственный разрез3.
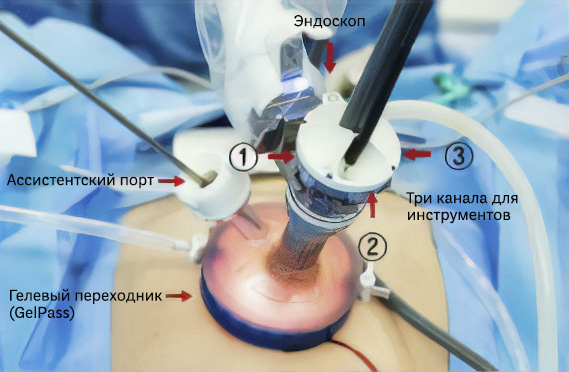 Канюлю da Vinci® SP можно ввести через гелевый переходник (GelPass), еще один троакар вводится на расстоянии 1,5 см от канюли.
Канюлю da Vinci® SP можно ввести через гелевый переходник (GelPass), еще один троакар вводится на расстоянии 1,5 см от канюли.Так выглядит разрез при проведении робот-ассистированной лобэктомии системой da Vinci SP.

Положение для субксифоидного и субкостального доступа:
- фото слева - боковое положение в положении лежа, подксифоидный разрез с адаптированной системой гелевых точек и троакар 2,5 см с четырьмя рабочими каналами;
- в центре - правый подреберный разрез и направление системы гелевых точек, которое должно быть адаптировано к протектору раны. Дополнительный грудной разрез делается для управления движениями робота изнутри во время экспериментальной операции;
- справа - установка степлера хирургом во время левой верхней лобэктомии.
Преимущества робота da Vinci SP в сравнении с системами da Vinci Si или da Vinci Xi5
По сравнению с системами da Vinci Si или Xi, хирургическая система da Vinci SP имеет значительные преимущества с точки зрения эффективности хирургической техники в ограниченном пространстве. К ним относятся:
- переход от инструментов с полужестким корпусом к инструментам с жестким корпусом и двумя гибкими шарнирами, что дает большую точность и более свободный доступ к хирургической мишени. Таким образом, хирургу будет легче выполнять кропотливые хирургические процедуры, включая разрез, иссечение, коагуляцию, наложение швов и т. д.;
- роботизированные инструменты системы SP исключают отскок инструмента, который может возникать внезапно при приложении чрезмерной силы к полужестким инструментам с использованием систем Si и Xi;
- сокращение времени докинга и улучшение общей эффективности операции за счет необходимости размещения только одного многоканального роботизированного порта;
- гелевый переходник GelPass, используемый в RSPS (robotic single-port surgery - однопортовой роботической хирургии) дает дополнительное преимущество, так как позволяет канюле "плавать" на коже, сохраняя установленное расстояние от цели до кончика инструмента, тем самым создавая эффективное хирургическое пространство. Это упрощает выполнение различных процедур, таких как ирригация или отсасывание жидкости.
Информация для пациентов
Последние новости роботической хирургии



-1x.png)

