
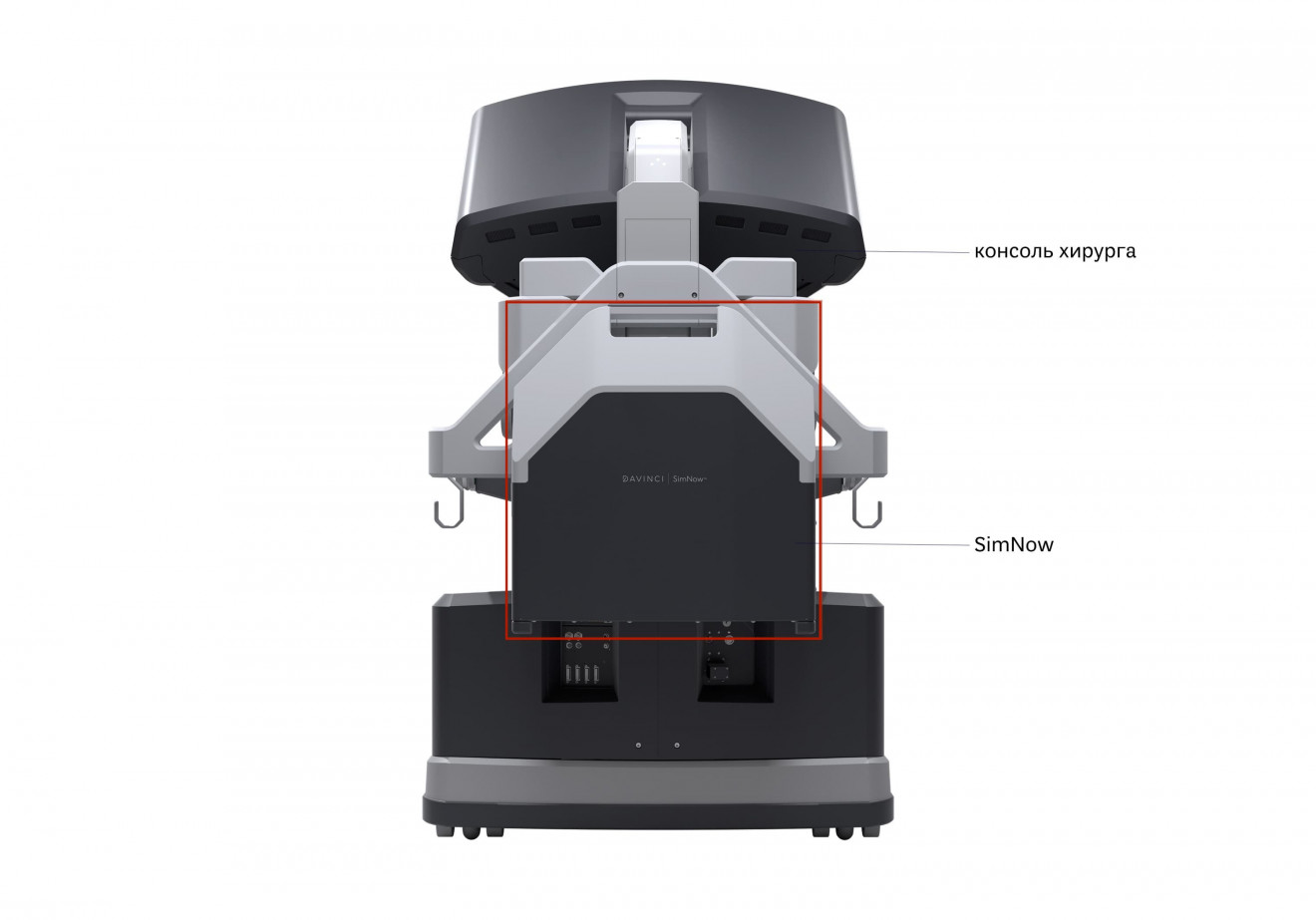
Обучающий симулятор SimNow
Роботические хирурги не всегда имеют возможность обучаться в условиях реальных операций. Недостаток опыта и практики могут увеличить количество осложнений и повторных госпитализаций пациентов1. Эти сложности, а также некоторые другие другие (знакомство с оборудованием, доступность поддержки и аналитики) могут отрицательно повлиять на качество и стоимость операции. Данные проблемы помогает решить обучающий симулятор для хирургической системы da Vinci – SimNow.
SimNow представляет из себя электронное устройство навесного типа, взаимодействующее с консолью хирурга и обеспечивающее виртуальную платформу для имитирующих упражнений по тренировке хирургических навыков. В da Vinci Xi (IS4000) симулятор способен моделировать этапы операций. Также предусмотрена программа для тренировки членов операционной бригады.
Функции SimNow
Используя SimNow, пользователь получает:
- стандартизированный опыт моделирования операций;
- постоянно растущую библиотеку тренингов, практических упражнений и хирургических операций в режиме виртуальной реальности;
- доступ к сетевой системе, которая автоматически обновляет программное обеспечение для моделирования, и позволяет удаленно управлять производительностью моделирования с ПК или смартфона. Этими данными можно делиться с другими пользователями системы;
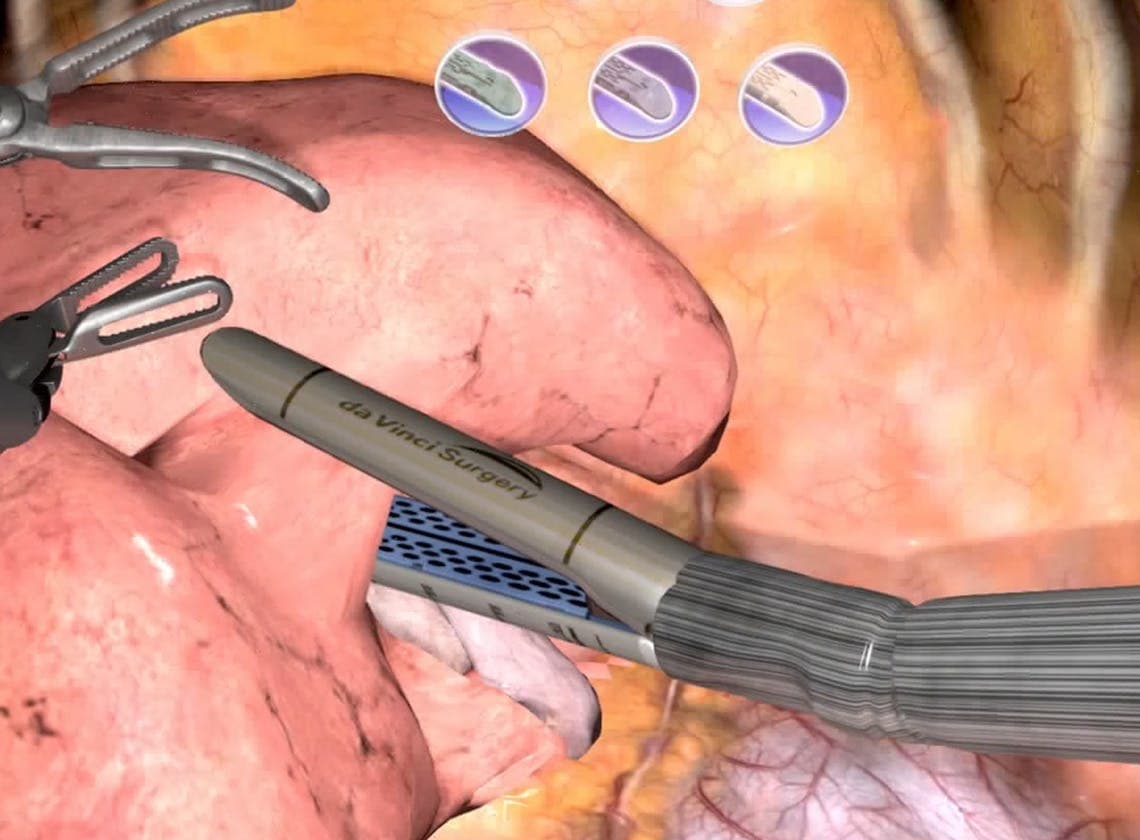
- возможность тренировать свои навыки, используя инструменты в виртуальной реальности и выполняя последовательность реалистичных упражнений;
- возможность проводить симуляционную операцию самостоятельно, либо под надзором опытного хирурга или вместе с ним;
- гибко настраиваемую учебную программу: упражнения подбираются в соответствии с уровнем хирурга (от новичка до профессионала). также пользователь может воспользоваться заранее установленным учебным планам.
Статистика по использованию симуляции da Vinci
- 3 поколения систем симуляции da Vinci разработаны на основе 10-летнего опыта роботических хирургов,
- 360 минут в среднем тратит хирург на обучение на симуляторе, прежде чем перейти к реальным тренировкам на роботе2,
- опубликовано более 300 работ о влиянии симуляционного обучения на навыки и эффективность роботического хирурга4,
- более 2/3 клиник, использующих робота da Vinci, также имеют обучающий симулятор3,
- более 45 тысяч часов работы на симуляторе хирурги проводят ежегодно2.
Преимущества SimNow
Исследования показали зависимость между практикой с использованием системы виртуальной реальности и эффективностью робот-ассистированных операций5-8:
- Преимущества с точки зрения практического опыта хирурга. Навыки работы с консолью хирурга могут значительно ухудшиться после нескольких дней отсутствия практики на хирургической системе9,10. Двухнедельная симуляционная практика в течение одного часа в день может быть достаточной для поддержания навыков роботизированной хирургии11.
- Преимущества для клиник. Хирурги, имеющие в качестве базовой подготовки от 6 часов работы с симуляцией, показывают более высокую продуктивность в течение 90 дней12.