Ученые из США создали первых в мире биороботов
13 января 2020 года ученые из Университета Вермонта (США) сообщили о создании первого биоробота, полностью состоящего из живых клеток.
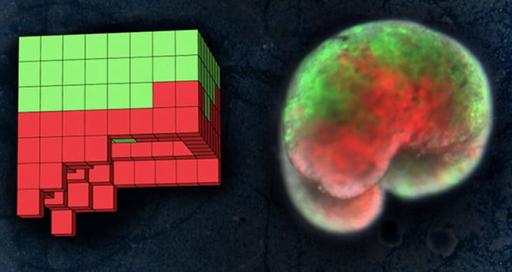
Новые существа были разработаны на суперкомпьютере в UVM, который из тысяч вариантов проектов отобрал наиболее перспективные, отвечающие запросам ученых, законам биофизики и анатомо-физиологическим свойствам материала.
Посредством специальных алгоритмов клетки лягушки были перепрофилированы, затем под микроскопом с помощью микрощипцов и электрода разделены и собраны в совершенно новые формы жизни - «ксеноботы». Получившиеся биороботы, имеющие ширину 1 мм и особую форму, состоящие из 500 - 1 тыс. клеток кожи и сердца эмбрионов лягушки, способны к передвижению, происходящему за счет сокращения кардиомиоцитов, а также к самовосстановлению после механических повреждений. Однако, их нельзя считать полноценно живыми из-за отсутствия функции размножения и свойства эволюционировать. Такие роботы пока ограничены водной средой обитания и живут несколько дней или недель, питаясь запасом эмбриональной энергии.
«Это новые живые машины», — говорит Джошуа Бонгар, специалист по компьютерным технологиям и робототехнике в Университете Вермонта, один из руководителей исследования — «Они не являются ни традиционным роботом, ни известным видом животных. Это новый класс артефактов: живой, программируемый организм».
 Механизм передвижения ксенобота
Механизм передвижения ксеноботаПотенциал исследования заключается в понимании процессов взаимодействия клеток с точки зрения вычислительной техники, понимании алгоритмов, определяющих форму и функции.
Для того чтобы организм развивался и функционировал, постоянно происходит не только межнейронный, но и межклеточный, внутриклеточный обмен информацией и сотрудничество — органические вычисления. Они определяются биоэлектрическими, биохимическими и биомеханическими процессами, «которые протекают на оборудовании, определенном ДНК, — говорит руководитель Центром регенеративной биологии и биологии развития в Уиверситете Тафтс, Майкл Левин, — и эти процессы можно реконфигурировать, создавая новые живые формы».
 Четвероногий ксенобот, диаметром 650-750 микрон, немного меньше булавочной головки
Четвероногий ксенобот, диаметром 650-750 микрон, немного меньше булавочной головкиПо мнению ученых, ксеноботов в будущем можно использовать в медицине для целевой доставки препаратов или устранения бляшек в кровеносных сосудах.
Ранее проводились подобные исследования. Но каждое из них – внесение доработок в имеющуюся живую систему или внедрение живых клеток на искусственно созданный каркас.
Так, в лаборатории iBionicS Университета Северной Каролины в 2012 году создали радиоуправляемого таракана, прикрепив на его спину чип с аккумулятором. Корректировка траектории движения происходила с помощью воздействия сигналов с чипа на нервную систему через усики.
В марте 2016 года ученые Наньянского университета, производя воздействие на определенные группы мышц, приводили в движение лапки жука Mecynorhina torquata. Меняя очередность воздействия и его силу, регулировали скорость передвижения насекомого 1.
В 2012 году сотрудниками Гарвардского университета и Калифорнийского технологического института был создан «медузоид» 2, путем нанесения рисунка из протеинового раствора на полимерную матрицу. По строению получившийся бот напоминает медузу Aurelia aurita и использует те же принципы передвижения – за счет сокращения мышц и выталкивания жидкости. Для обеспечения этого «медузоид» помещен в электропроводящий соляной раствор, где воздействием электрических импульсов стимулируется сокращение мышечных клеток.
На основании этого исследования 2016 году группа ученых из Гарварда произвела разработку «золотого» ската 3,4. «Скелетом» для данной системы стало золото благодаря нереагентности в нормальных условиях. С помощью внедрения в миоциты гена, отвечающего за выработку светочувствительного белка KR2 – переносчика ионов натрия, удалось добиться генерации электрического потенциала и сокращения мышечной клетки, приводящей в движение ската.
Первый прототип биоробота, не имеющего аналогов в природе, создали ученые из Университета Иллинойса в 2012 году. Это был напечатанный трехмерный каркас из гидрогеля с высеянными на его поверхность кардиомиоцитами мыши 5,6, которые при определенных внешних условиях самостоятельно сокращались и расслаблялись, приводя биобота в движение.