Отличительные особенности робота da Vinci Si и da Vinci Xi (IS4000)
В линейке da Vinci насчитывается уже 5 поколений роботов. Новейший из них - da Vinci SP - используется в мире с 2018 года, но не доступен в России. Отечественные хирурги оперируют на da Vinci Si - роботе третьего поколения. Логично, что следующим этапом развития высокотехнологичной хирургии в нашей стране станет освоение системы четвертого поколения da Vinci Xi (IS4000).
 Слева направо: консоль хирурга, видеостойка, консоль пациента da Vinci Xi, консоль пациента da Vinci SP, консоль пациента da Vinci Si
Слева направо: консоль хирурга, видеостойка, консоль пациента da Vinci Xi, консоль пациента da Vinci SP, консоль пациента da Vinci SiВ статье мы хотим рассказать об отличительных особенностях роботов da Vinci серий Si и Xi (IS4000). Материал подготовлен на основе данных компании Intuitive - производителя робота da Vinci.
Консоль пациента
Самое значительное отличие da Vinci Xi от модели Si, которое привлекает к себе больше всего внимания – это консоль пациента c обновлённым дизайном и полностью переработанной эргономикой консоли.
 Слева - консоль пациента робота da Vinci Si, справа - консоль пациента робота da Vinci Xi
Слева - консоль пациента робота da Vinci Si, справа - консоль пациента робота da Vinci XiРобот da Vinci модели Xi отличается высокой мобильностью роботических рук и обеспечивает лучший доступ к операционному полю благодаря вертикальному доступу к пациенту. Вертикальный доступ da Vinci Xi означает, что консоль пациента робота-хирурга может свободно вращаться над пациентом на 360 градусов, обеспечивая, таким образом, анатомический доступ из четырех секторов (мультиквадрантный доступ).
Система лазерных датчиков робота da Vinci Xi помогает персоналу безошибочно определить безопасное расстояние от посторонних объектов вне зоны видимости.
 Система лазерных датчиков робота da Vinci Xi
Система лазерных датчиков робота da Vinci Xi
Также модель da Vinci Xi (IS4000) снабжена сенсорной панелью, расположенной на внешней стороне консоли пациента. С её помощью можно выставить необходимые параметры для конкретной операции, и консоль автоматически примет наиболее оптимальное положение для стыковки с операционным столом. У модели Si данная функция отсутствует.
 Сенсорная панель робота da Vinci Xi
Сенсорная панель робота da Vinci Xi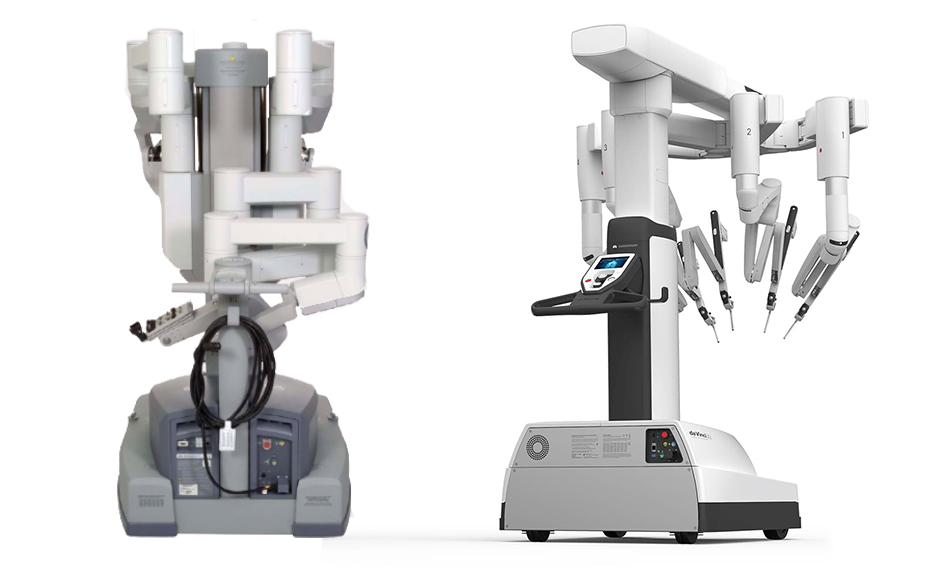 Слева: консоль пациента робота da Vinci Si (вид сзади), справа: консоль пациента робота da Vinci Xi (вид сзади, имеется сенсорная панель)
Слева: консоль пациента робота da Vinci Si (вид сзади), справа: консоль пациента робота da Vinci Xi (вид сзади, имеется сенсорная панель)Эндоскоп
Изменения в конструкции и функционале эндоскопа модели da Vinci Xi ускорили подготовку в предоперационном периоде и позволили создать дополнительные возможности для визуализации хирургического участка.
 Слева - эндоскоп робота da Vinci Si, справа - эндоскоп робота da Vinci Xi
Слева - эндоскоп робота da Vinci Si, справа - эндоскоп робота da Vinci Xi| da Vinci Si | da Vinci Xi | |
| Характеристики эндоскопа | 8.5мм и 12мм, угол обзора: 60°, разрешение 1280 x 720 до 1024 | 8мм, угол обзора: 80°, разрешение 1280 x 1024 |
| Конструкция эндоскопа | Конструкция состоит из двух элементов | Камера, эндоскоп и кабели интегрированы в одну портативную облегченную конструкцию |
| Настройки эндоскопа | 3D калибровка: требуется настройка баланса белого: требуется драпировка: требуется ручная настройка фокуса | 3D калибровка: не требуется настройка баланса белого: не требуется драпировка: не требуется настройка фокуса не требуется |
| Флуоресцентная визуализация (технология FireFly) | дополнительная опция, необходимо использовать отдельный эндоскоп | встроенная технология |
| Манипулятор камеры | 1 специализированный манипулятор камеры | камера может быть установлена в любой из 4х манипуляторов |
Электрогенератор
Новый электрогенератор ERBE Vio dV – специализированный хирургический электрогенератор интегрирован в видеостойку и обладает программным обеспечением, предназначенным для работы с da Vinci Xi. Модель da Vinci Si поставлялась без электрогенератора, его нужно было приобретать отдельно.
 Слева: электрогенератор робота da Vinci Si, справа: интегрированный электрогенератор ERBE Vio dV модели da Vinci Xi.
Слева: электрогенератор робота da Vinci Si, справа: интегрированный электрогенератор ERBE Vio dV модели da Vinci Xi.Докинг
Исследования, сравнивающие две системы, показали, что в случае с использованием системы Xi большее количество операций было проведено однократным докингом с обеспечением мультиквадрантного доступа. В представленной ниже инфографике вы можете ознакомиться с результатами исследований по сравнению числа ректальных резекций, проведенных с использованием Si и Xi (нижняя передняя резекция1, полное мезоректальное иссечение2).
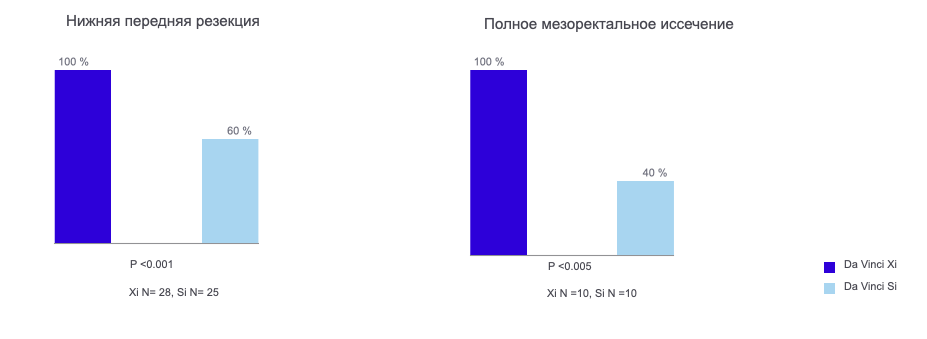
Результаты исследований: у группы пациентов, где вмешательство произведено на системе Xi, все операции были полностью проведены роботическим способом с однократным докингом роботизированной системы. В группе Si 10 из 25 пациентам (40%) провели конверсию в открытую/лапароскопическую операцию из роботической. Оставшимся 15 пациентам операция была проведена полностью роботическим методом, но с редокингом во время процедуры. В результате, время операций, проведенных на da Vinci Xi было меньше, чем при использовании da Vinci Si (значение Р <0,05 было определено как приемлемое значение):
- среднее время работы консоли (265,7 ± 60,9 у Xi против 317,1 ± 70,5 мин у Si; P = 0,006),
- общее время операции (321,6 ± 69,4 против 360,4 ± 63,2 мин; P = 0,039),
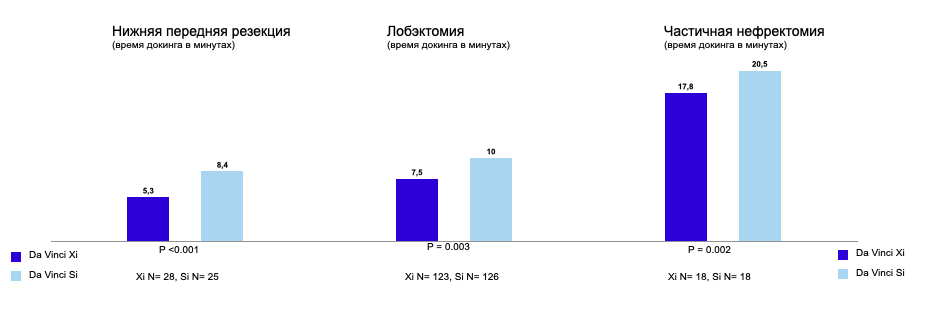
- время стыковки (5,3 ± 1,3 против 8,4 ± 3,6 мин; P <0,001).
Исследования показали, что существует зависимость эффективности операции от времени докинга. При использовании модели Xi докинг проходит быстрее. На графике представлено сравнение времени докинга для операций: нижняя передняя резекция1, лобэктомия3, частичная нефректомия4.
Инструменты
Робот da Vinci Xi, в отличие от da Vinci Si, имеет расширенный портфель инструментов. Кроме того, модель Xi имеет более длинные стержни инструментов и, следовательно, обеспечивает лучшую досягаемость хирургических мишеней.
| da Vinci Si | da Vinci Xi | |
| EndoWrist Vessel Sealer | опционально | встроенная технология |
| EndoWrist Stapler 45 мм | опционально | встроенная технология |
| EndoWrist Stapler 30 мм | - | встроенная технология |
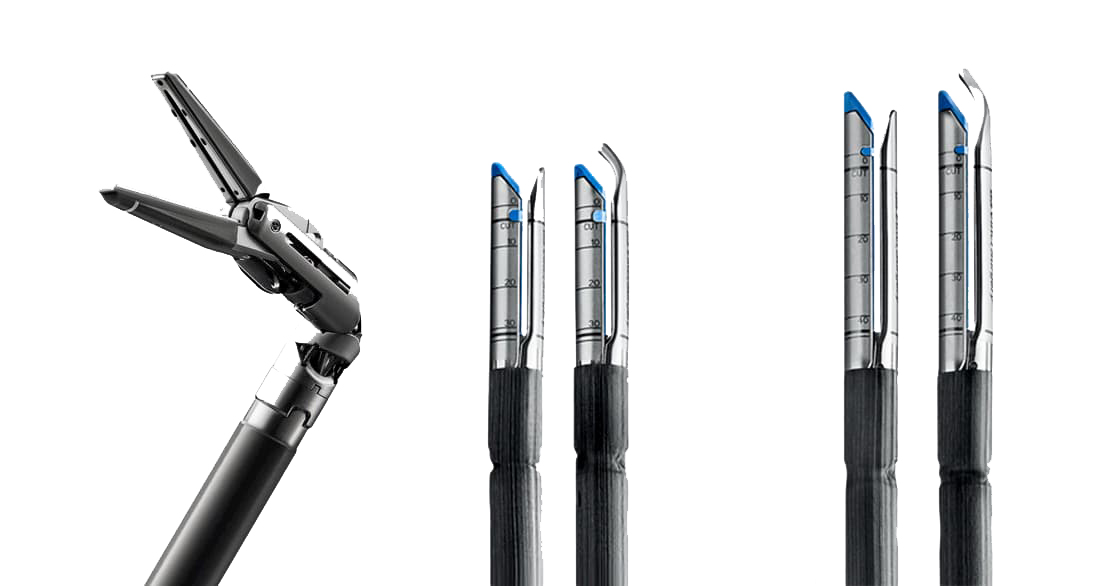 Слева направо: EndoWrist Vessel Sealer, EndoWrist Stapler 30 мм, EndoWrist Stapler 45 мм
Слева направо: EndoWrist Vessel Sealer, EndoWrist Stapler 30 мм, EndoWrist Stapler 45 ммПрочие характеристики
| da Vinci Si | da Vinci Xi (IS4000) | |
| Подвижность манипуляторов | наклон по саггитальной плоскости 336° наклон по фронтальной плоскости 149° ось введения 28,75 см | наклон по саггитальной плоскости: 504° наклон по фронталььной плоскости 177° ось введения 34.29 см |
| Максимальная рабочая дистанция | +4,4 см | |
| Доступ к пациенту | горизонтальный | вертикальный |
| Постановка портов | установка портов производится вручную | автоматическая конфигурация манипуляторов под основные типы операций и система лазерного наведения облегчают процесс постановки портов |
| Электрохирургический генератор | приобретается отдельно | ERBE Vio dv интегрирован в видеостойку |
| Сенсорная панель управления стойки пациента | отсутствует | присутствует со встроенным голосовым помощником |
| Система лазерного наведения на анатомическую область | отсутствует | присутствует, конфигурация манипуляторов автоматически изменяется под заданный тип операции |
| Вес комплекса | консоль хирурга 362,8 кг консоль пациента 544,3 кг видеостойка 90,7 кг | консоль хирурга 263 кг консоль пациента 821 кг видеостойка 258,5 кг (вес видеостойки увеличился за счет интегрированного электрохирургического генератора) |
Видеоматериалы: презентация da Vinci Si и da Vinci Xi (IS4000)
Динамичный операционный стол The Trumpf Medical
Робот da Vinci модели Xi (IS4000), в отличие от предшественника, имеет совместимость с динамичным операционным столом производителя The Trumpf Medical модели TruSystem® 7000dV. Стол позволяет размещать пациента в положении Тренделенбурга с возможностью наклона ± 45 °, наклона ± 30 ° при общей грузоподъемности в 450 кг. Это обеспечивает оптимальный доступ к хирургической мишени, тем самым расширяя возможности мультиквадрантной хирургии и повышая эффективность операции в целом.
К прочим преимуществам операционного стола TruSytem® 7000dV относятся:
- мониторинг столкновений,
- безпроводная связь и управление,
- интуитивно понятный интерфейс и улучшенная эргономика,
- гибкая настройка функций,
- возможность изменения положения пациента без редокинга при урологических, гинекологических и общих хирургических вмешательствах.
 Операционный стол The Trumpf Medical
Операционный стол The Trumpf Medical

Информация для пациентов
Последние новости роботической хирургии